Difference between revisions of "Category: FracDesign"
From wiki.pengtools.com
(→Math & Physics) |
(→Nomenclature) |
||
| Line 126: | Line 126: | ||
:<math>M</math> = mass, kg | :<math>M</math> = mass, kg | ||
:<math>V</math> = volume, m<sup>3</sup> | :<math>V</math> = volume, m<sup>3</sup> | ||
| + | :<math>t_e</math> = total pumping time, sec | ||
optiFrac | optiFrac | ||
Revision as of 11:23, 10 October 2018
Contents
Brief
fracDesign is a tool for designing a hydraulic fracture treatment in pengtools.
For the given set of reservoir, fluid and proppant properties fracDesign calculates the pumping schedule which will create the optimal fracture geometry to achieve maximum well’s productivity.
fracDesignis available online at www.pengtools.com.
Main features
- PKN and KGD fracture geometry models
- optiFrac workflow on fracture geometry optimization
- Slurry concentration versus time pumping schedule as plot and table
- Fracture length and width profiles vs time plots
- Net pressure profiles vs time as plot and table
- Practical pumping constrains and Fracture tuning options
- Detailed output table with calculated fracture design parameters
- Sensitivity option with benchmark to potential
- Simulation mode: calculating the fracture geometry from the given pumping schedule
Interface features
- "Default values" button resets input values to the default values.
- Switch between Metric and Field units.
- Save/load models to the files and to the user’s cloud.
- Export pdf report containing input parameters, calculated values and the chart.
- Share models to the public cloud or by using model’s link.
- Continue your work from where you stopped: last saved model will be automatically opened.
- Download the chart as an image or data and print (upper-right corner chart’s button).
Math & Physics
 - hydraulic maximum fracture width PKN (ref[1] eq 9.53)
- hydraulic maximum fracture width PKN (ref[1] eq 9.53)
 - hydraulic maximum fracture width KGD (ref[1] eq 9.55)
- hydraulic maximum fracture width KGD (ref[1] eq 9.55)
 - plain strain modulus
- plain strain modulus
 - hydraulic average fracture width
- hydraulic average fracture width
 - shape factor PKN (ref[1] eq 9.10)
- shape factor PKN (ref[1] eq 9.10)
 - shape factor KGD (ref[1] eq 9.24)
- shape factor KGD (ref[1] eq 9.24)
 - propped fracture width
- propped fracture width
 - mass balance equation (ref[1] eq 8.1)
- mass balance equation (ref[1] eq 8.1)
 - injected volume into one fracture wing
- injected volume into one fracture wing
 - the area of one face of one wing for rectangular fracture shape
- the area of one face of one wing for rectangular fracture shape
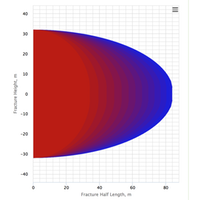
 - the area of one face of one wing for elliptic fracture shape
- the area of one face of one wing for elliptic fracture shape
 - volume of fluid contained in one fracture wing
- volume of fluid contained in one fracture wing
 - volume of fluid leak-off to formation through the two created fracture surfaces of one wing
- volume of fluid leak-off to formation through the two created fracture surfaces of one wing
 - mass balance equation (ref[2] eq 4.6)
- mass balance equation (ref[2] eq 4.6)
 - fluid efficiency
- fluid efficiency
Opening time distribution factor KL
Nolte opening time distribution factor KL
 - (ref[1] eq 8.36)
- (ref[1] eq 8.36)
Carter opening time distribution factor KL
 (ref [2] eq 4.8)
(ref [2] eq 4.8)
where:
 (ref [2] eq 4.9)
(ref [2] eq 4.9)
and:
 (ref [2] eq 4.9)
(ref [2] eq 4.9)
Nolte G-function for opening time distribution factor KL
 (ref [2] eq 4.12)
(ref [2] eq 4.12)
where:
{kind=link}
Pumping schedule
According to Nolte[3] the schedule is derived from the following assumptions:
- the whole length created should be propped
- at the end of pumping, the proppant distribution in the fracture should be uniform
- the proppant schedule should be of the form of a delayed power law with the Nolte's exponent and the fraction of pad being equal
 - Nolte exponent
- Nolte exponent
 - pad pumping time
- pad pumping time
 - proppant concentration at the end of pumping
- proppant concentration at the end of pumping
 - slurry concentration vs time
- slurry concentration vs time
 - ramping stage duration
- ramping stage duration
 - ramping stage slurry concentration
- ramping stage slurry concentration
 - conversion form slurry concentration (proppant mass per unit of injected slurry) to clean concentration (proppant mass per unit of injected clean/base/"neat" fluid)
- conversion form slurry concentration (proppant mass per unit of injected slurry) to clean concentration (proppant mass per unit of injected clean/base/"neat" fluid)
Flow Diagram
Comparison study
Nomenclature
 = width, m
= width, m = rheology flow behavior index, dimensionless
= rheology flow behavior index, dimensionless = rheology consistency index, Pa*sn
= rheology consistency index, Pa*sn = slurry injection rate for one wing, m3/sec
= slurry injection rate for one wing, m3/sec = height, m
= height, m = fracture half-length, m
= fracture half-length, m = Young's Modulus, Pa
= Young's Modulus, Pa = plain strain modulus, Pa
= plain strain modulus, Pa = mass, kg
= mass, kg = volume, m3
= volume, m3 = total pumping time, sec
= total pumping time, sec
optiFrac
 = dimensionless fracture conductivity, dimensionless
= dimensionless fracture conductivity, dimensionless = shape factor, dimensionless
= shape factor, dimensionless- = Young's Modulus, psia
 = f-function, dimensionless
= f-function, dimensionless = proppant permeability reduction due to gel damage, %
= proppant permeability reduction due to gel damage, % = penetration ratio, dimensionless
= penetration ratio, dimensionless = dimensionless productivity index, dimensionless
= dimensionless productivity index, dimensionless = permeability, md
= permeability, md = dimensionless proppant number, dimensionless
= dimensionless proppant number, dimensionless = dimensionless pressure (based on average pressure), dimensionless
= dimensionless pressure (based on average pressure), dimensionless = net pressure, psia
= net pressure, psia = specific gravity, dimensionless
= specific gravity, dimensionless- = volume, ft3
 = drainage area, ft2
= drainage area, ft2
Greek symbols
 = dry to wet width ratio at the end of pumping, usually 0.5-0.7
= dry to wet width ratio at the end of pumping, usually 0.5-0.7 = geometric factor in vertical direction, dimensionless
= geometric factor in vertical direction, dimensionless = Poisson's ratio, dimensionless
= Poisson's ratio, dimensionless  = porosity, fraction
= porosity, fraction = 3.1415
= 3.1415 = density, kg/m3
= density, kg/m3
Superscripts
- opt = optimal
- pss = pseudo-steady state
- ss = steady state
Subscripts
- e = external
- f = fracture
- gross = gross
- max = maximum
- net = net
- prop = propped or proppant
- r = reservoir
- hydr = hydraulic
- prop = propped
- PKN = Perkins-Kern-Nordgren geometry
- KGD = Khristianovic-Geertsma-de Klerk geometry
- avg = average
- i = injected
- L = leak-off
References
- ↑ 1.0 1.1 1.2 1.3 1.4 1.5 Valko, Peter; Economides, Michael J. (1995). Hydraulic fracture mechanics. Texas A & M University: John Wiley and Sons.
- ↑ 2.0 2.1 2.2 2.3 2.4 Economides, Michael J.; Oligney, Ronald; Valko, Peter (2002). Unified Fracture Design: Bridging the Gap Between Theory and Practice. Alvin, Texas: Orsa Press.
- ↑ Nolte, K.G. (1986). "Determination of Proppant and Fluid Schedules From Fracturing-Pressure Decline"
 (SPE-13278-PA). Society of Petroleum Engineers.
(SPE-13278-PA). Society of Petroleum Engineers.
Pages in category "FracDesign"
The following 8 pages are in this category, out of 8 total.